Quelques explications en attendant :
Attention.. je ne suis pas un pro. Donc...
 1- Présentation :
1- Présentation :
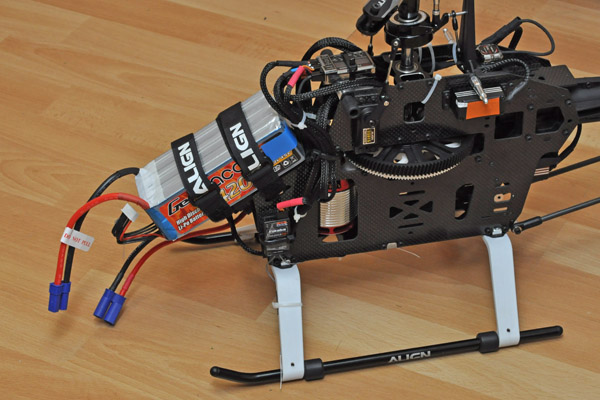
A la différence des modules actuels très répandus en 2013-2014 comme le BeastX et le module Align 3Gx, le module FBL Futaba CGY 750 comporte 2 parties (comme l’ancien module Align 3G) avec :
- le module CGY 750 proprement dit sur lequel on connectera les servos et la liaison S-bus au récepteur (si on dispose pas de Rx Futaba s-bus, on doit utiliser une interface supplémentaire… Donc, pas franchement « ouvertl », mais possible.)
- le gyroscope 3 axes que l’on fixera à plat
Le firmware actuel, est sorti au printemps 2014 c’est la version 1.40. La MAJ s’effectue au moyen d’une interface USB (CIU-2) que l’on relie à un PC. Les MAJ sont gratuites.Pour tte MAJ, je pense qu'il faut tout reprendre, car les réglages antérieurs peuvent être modifiés. Les menus, les items, peuvent être différents.
Le CGY 750 n’est pas pourvu de fonction « horizontal mode » (récupération d’assiette) comme les anciens modules de stabilisation (Helicommand de Robbe, KDS Flymentor) ou plus récents, cette fois avec fonction FBL comme il me semble le MSH Brain.
Le paramétrage du CGY 750 ne nécessite pas de PC. Les paramètres en lettres et/ou en chiffres sont directement lisibles sur l’écran (pas de LED de couleur ou de nombre de clignotements à compter).
Si on dispose de Tx Futaba type Fx 22, 8FG, 14 FG, entre autre les gains cycliques (en plus du gain d’AC) sont directement paramétrables via la TX. C’est pratique sur le terrain.
2- Les écrans et menus
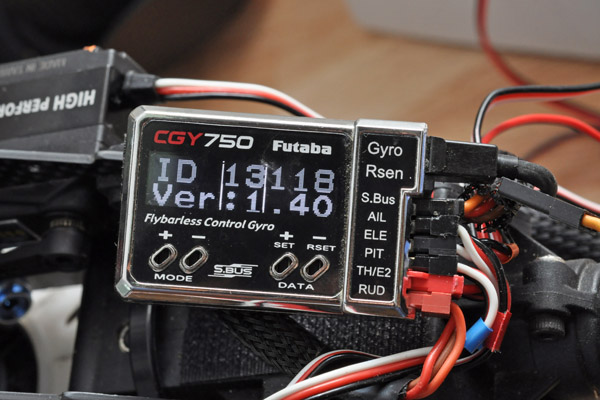
Ecrans de démarrages
- ID et version firmware : au mois de juillet 2014, la dernière version est la 1.40 qui suit la ver 1.31
- Initialisation prprt dite : image d'un hélico qui tourne sur lui-même
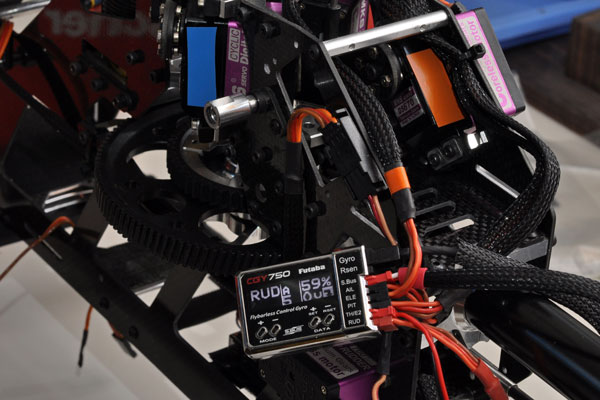
ECRAN D'ACCUEIL ou first map
En sdt RUD A ou V ___% en première ligne = RUD mode normal ou AVCS, % du gain
et Gov on ou off / voltage Rx en seconde ligne
A partir de cet écran
- Vérif réglages actuels (MODE +/-)
- Modif des réglages (DATA +/-)
AFFICHAGE / VERIF REGLAGES ACTUELS, EN COURS (MODE +/-)
Si on appuit sur les touches MODE +/- on affiche les différents paramètres en cours, actuels (RUD, AILE, ELEV, mode opérationnel sans GOV/GOV/H4, taux de roulis max relevé en fin de vol, taux de profondeur max relevé en fin de vol)
+ on peut sélectionner affichage permanent/fort ou pas = OLED. MD Light (permanent maxi) ou Saver (à la demande et réduit) => Light = sert en pratique lors les réglages. Sinon en sdt, on reviendra en mode "ECO" (saver)
Pour GOV => en fait c'est le mode fonctionnement... avec 3 possibilités :
- pas de GOV (sauf H4) = Gyro + Throtte
- GOV (sauf H4) = Gyro + Gov
- Config plateau de type H4 (donc pas de GOV en H4 ++) = Gyro + H4
MODIFICATION DES REGLAGES (DATA +/-)
on modifie les réglages en appuyant les touches DATA +/-
avec 2 niveaux de modif : BASIC et EXPERT
Perso je pense qu’il faut se « contenter » dans un premier temps au moins de paramétrer le mode BASIC. Puis les premiers tests en vol faits.. aller éventuellement dans le mode EXPERT si on a des souhaits particuliers.
Mode BASIC
Dans l'ordre de réglage pour moi... qui ne suit pas forcément l'ordre d'affichage des vérifications des réglages / paramèters encours (= MODE) ni celui des modifications réalisables (= DATA)
Rqe : Mécaniquement, cad avant motage d'un module FBL quelqu'il soit je pense que l'hélico doit être "nif" ++ Les neutres au cyclique d'applomb. Idem l'AC avec une mécanique AC "fluide". L'absence de vibration (ou le moins possible => rechercher à les faire disparaitre)
1- S-Bus = affectation des voies +++
2- Plateau cyclique : Global (menu basique et expert) -
type servos (anal / digitaux => Si digitaux freq fonctionnement)
type plateau
taille hélico
mixages des servos de cyclique => Servo Dir Comb #1, 2, ou.. = trouver la combinaison qui donne ttes les commandes dans le bon sens (AILE, ELEV et PITCH)
V1.4 : neutre et swash dir AILE,ELEV et PITCH pour corriger le sens des commandes direct menu basic (ça fait pas double emploi avec le servo dir Combo ?),
puis débattement/pas cyclique avec swash rate (global) = pas cyclique long et lat en sdt 6 à 9° (val par défaut en %..). Plus de différence entre long et lat... (comme en 1.31)
puis débattement/pas général avec pitch rate = pas général en sdt +/- 12° (val par défaut en %..);
puis sens de correction/ compensation AILE et ELEV +++ vérifier le sens. Si OK en "normal" => laisser. Si pb en "normal" (compensation dans le mauvais sens) => changer le sens en "reverse".
puis swash ring = vérif pas de servos en butée. Si butée diminuer la valeur... A l'inverse si on a bcp de place on peut l'augmenter.
puis nouveau dans v 1.31 (idem 1.40) "contrôle mémorisation" :
- cyclique : sens des commandes AILE coté Dt (AIL. Rt), ELEV up
- pas général avec 3 points : valeur mini, zéro et haute. Pas mini = Pit. Low, ELEV au pas zéro (pales principales à plat) = Pit. Zero, en haut = Pit. High (intérêt en réglages basic ? - Intérêt à priori pour.. les mixages en réglages EXPERT)
enfin sens de compensation pirouette. Avec ROT equa (défaut = off) et Equa Diff (normal ou reverse) = Perso en 1.31 on avait 3 paramètres : phase eq, rot eq et eq dir. En 1.40 ils ont supprimé phase eq... Perso j'étais en phase eq ON, rot eq ON, et... Eq Rot REVERSE. Phase servait en mode GOV...
FLIGHT TUNING MAP (new en 1.41)
=> sinon à l'intérieur c'est connu au début
mode de travail normal ou AVCS via Tx (CMT = choix sur Tx type FX22, 8 et 14 FG / Normal ou reverse = autres Tx)
=> puis ça change...
AILE gain separation (AILE sepa)
Cyclic gain setting ? (CYCL rate)
Control gain (CNT gain)
Expo
Resp Style (réponse de 1 à 20, par défaut 12 !!) - valeur montante ++ (sdt 8-12, agressif 15..) N !! C'est différent du sens de l'ancien Flight mode..
Stabilité au statio ou en translation ? (stab Gain)
Elev pré compens ?
Hight Pitch gain ?
Rqe : Plateau cyclique = spécifique (AILE et ELEV séparés)
En 1.31 on avait
en global = Flight mode pré-set de 1 à 5.. (de l'expert en descendant ++ / sdt = 3 / débutant = 4 ou 5) => Resp Style ? (en 1.40)
puis sélectif Plateau cyclique latéral ou roulis
puis sélectif Plateau cyclique longitudinal ou profondeur : Où ça en 1.40 ? (menu basique, expert AILE, expert ELEV)
3- AC ou Rudder (menu basique et expert)
En basic :
type servos
sens de compensation AC ++
limites
type de vol = en fait rapidité de la pirouette !! Sport = cool, hard = 3D
4- GOV (menu basique et expert)
MODE EXPERT
Je ne suis pas un expert... mais je modifie 1 paramètre ici ++
Je ne touches pas à :
Expo (EXP)
Temporisation (Dly = Delay / fonction = temporisation cad commande "douce" et Constant =... réponse linéaire cad en pratique, réponse plus "sèche")
Amortissement à l'aller / au retour (CNT pour control, D pour delay, IN pour aller cad neutre vers les extrêmes et out pour au retour cad des extrêmes au neutre).
Mixages !!
etc.. mais c'est pas interdit.
Je modifie si besoin ce paramètre :
Head response (réponse de la tête fonction de la rapidité des servos. 1= servos top.. 2 ou 3 = servos un peu moins rapido. Si Head response fixée à 1 avec des servos "sdt" les servos chauffent ou.. ne suivent pas). Sens.. descendant !!
Vos avis !! <_< - J'ai dû faire qqes erreurs, merci de les coriger de façon sympa. L'idéal serait de disposer à termes d'un doc "simple" qui serat alors placé au début du post.. pour faciliter la tâche de ceux qui le liront par la suite sans avoir à se taper ttes les pages. Non ?

")
Bon WE à tous.