DM4, Rotor D'AC Pas variable ! et pourquoi pas?
-
pilip

- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Bonsoir tout le monde.
Voila une idée qui est venue me taquiner l'esprit ce matin entre deux bols de café.
et si le DM4 avait un rotor d'AC à pas variable? pourquoi à pas variable me direz vous! Et bien je vais essayer de ne pas dire de bêtise, je commence en Helico (2 semaines) et evidement comme toute personne découvrant quelque chose, plein de questions me viennent en tête, valables ou non, mais pourquoi pas après tout.
Après quelques stationnaire avec mon DM4, je me suis aperçu que le rotor D'AC etait plus efficace dans un sens que dans l'autre! et même pas forcément d'une grande réactivité,c'est une evidence. et que pour palier à cela, la solution principale est : le D-Drive, avec un micro speed et ou un CN12.et une Gws4035 en prise direct (voir un micro brushless). certe on augmente la réactivité et la puissance du rotor c'AC, mais reste que dans un sens on bénéficie de la traction fournie pas le moteur, et dans l'autre de l'arrêt de celui ci et de la seule force dévelopée par le rotor principal.
Mais lié a l'inertie du système, et a son aérodynamisme, et bien on à toujours pas un rotor d'AC efficace dans les deux sens.
Pour ceux d'entre vous qui auraient lu ma présentation, vous aurez remarqué que j'ai un rotor d'AC avec des pales faite a base de bouteille de coca ^^, du coup la fonctionnalité de mon AC et probablement encore plus a remettre en question !:)
mais si l'on y réflechis, sur un 4 en 1 esky, on peut récupérer le signal, qu'il soit pour la commande moteur principal ou ac, (ce que j'ai fait pour mettre un moteur brushless en principal)alors si l'on peut commander un contrôleur brushless, pourquoi pas un servos suplémentaire, la commande d'ac agirait de la même manière! et l'aspect des rotor d'AC de DM4 me laisse penser que l'on peut faire un système de commande de pas sans trop fragiliser celui ci.
mais alors comment alimenter notre moteur d'AC?
- avec la commande d'alim du moteur principal (et un régulateur de tension) c'est pas le plus difficile a faire (5v tt le temp).
Sachant que des servo micro pesent environ 4-5gr pour certains, l'exces de poid ne sera pas forcément le principal à craindre.
Mais voila, sur le papier c'est presque beau, on aurait un rotor d'AC efficace a 300%, mais c'est quand même un modification profonde de cette mécanique.
Je fais donc appel a l'avis des Anciens , et de ceux qui sont passés au D-Drive,
, et de ceux qui sont passés au D-Drive,
Est ce la peine de s'attacher a cette idée ou est elle saugrenue?
Techniquement est ce possible? ( l'avis d'un personne experimentée en électronique serait interessant je pense)
Voila voila voila. je m'en vais réflechir a la prochaine idée tordue que j'aurais
Voila une idée qui est venue me taquiner l'esprit ce matin entre deux bols de café.
et si le DM4 avait un rotor d'AC à pas variable? pourquoi à pas variable me direz vous! Et bien je vais essayer de ne pas dire de bêtise, je commence en Helico (2 semaines) et evidement comme toute personne découvrant quelque chose, plein de questions me viennent en tête, valables ou non, mais pourquoi pas après tout.
Après quelques stationnaire avec mon DM4, je me suis aperçu que le rotor D'AC etait plus efficace dans un sens que dans l'autre! et même pas forcément d'une grande réactivité,c'est une evidence. et que pour palier à cela, la solution principale est : le D-Drive, avec un micro speed et ou un CN12.et une Gws4035 en prise direct (voir un micro brushless). certe on augmente la réactivité et la puissance du rotor c'AC, mais reste que dans un sens on bénéficie de la traction fournie pas le moteur, et dans l'autre de l'arrêt de celui ci et de la seule force dévelopée par le rotor principal.
Mais lié a l'inertie du système, et a son aérodynamisme, et bien on à toujours pas un rotor d'AC efficace dans les deux sens.
Pour ceux d'entre vous qui auraient lu ma présentation, vous aurez remarqué que j'ai un rotor d'AC avec des pales faite a base de bouteille de coca ^^, du coup la fonctionnalité de mon AC et probablement encore plus a remettre en question !:)
mais si l'on y réflechis, sur un 4 en 1 esky, on peut récupérer le signal, qu'il soit pour la commande moteur principal ou ac, (ce que j'ai fait pour mettre un moteur brushless en principal)alors si l'on peut commander un contrôleur brushless, pourquoi pas un servos suplémentaire, la commande d'ac agirait de la même manière! et l'aspect des rotor d'AC de DM4 me laisse penser que l'on peut faire un système de commande de pas sans trop fragiliser celui ci.
mais alors comment alimenter notre moteur d'AC?
- avec la commande d'alim du moteur principal (et un régulateur de tension) c'est pas le plus difficile a faire (5v tt le temp).
Sachant que des servo micro pesent environ 4-5gr pour certains, l'exces de poid ne sera pas forcément le principal à craindre.
Mais voila, sur le papier c'est presque beau, on aurait un rotor d'AC efficace a 300%, mais c'est quand même un modification profonde de cette mécanique.
Je fais donc appel a l'avis des Anciens
Est ce la peine de s'attacher a cette idée ou est elle saugrenue?
Techniquement est ce possible? ( l'avis d'un personne experimentée en électronique serait interessant je pense)
Voila voila voila. je m'en vais réflechir a la prochaine idée tordue que j'aurais
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
Marc_30_34

- Chancelier Suprême
- Messages : 546
- Enregistré le : 11 janv. 2009, 20:27
C'est une idée  mais pourquoi pas passé directement au compy dans ce cas !
mais pourquoi pas passé directement au compy dans ce cas !
[img]http://goodies.heli4.com/icones/drapo_fr.png[/img] Sommières (30) - 25ans - [b]Padawan de Angels.arael[/b]
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Excelente question que celle-ci !
En fait, sans vouloir changer de materiel de base, donc en fait pour éviter des frais supplémentaire je l'avoue (c'est nul les fins de mois ric-rac) je cherchait une idée (astucieuse) pour faire évoluer cette petite bête qu'est mon DM4.
je cherchait une idée (astucieuse) pour faire évoluer cette petite bête qu'est mon DM4.
et j'avoue avoir encore quelques idées sorties tout droit de la boite la Bêtise afin de faire "évoluer" mon petit bestial( si si au pluriel c'est bestiaux) vers une machine plus "performante" si l'on peut le dire ainsi
vers une machine plus "performante" si l'on peut le dire ainsi
mais effectivement ta solution est aussi compy"letement" viable, dans un avenir proche je pense, enfin on verra si je ne me fait pas tirer les oreille en commencant un collection d'helico en su de la collection d'avion.
par ce qu'elle est pas commode la demoiselle desfois( j'espère qu'elle tombera pas sur mon post )
En fait, sans vouloir changer de materiel de base, donc en fait pour éviter des frais supplémentaire je l'avoue (c'est nul les fins de mois ric-rac)
et j'avoue avoir encore quelques idées sorties tout droit de la boite la Bêtise afin de faire "évoluer" mon petit bestial( si si au pluriel c'est bestiaux)
mais effectivement ta solution est aussi compy"letement" viable, dans un avenir proche je pense, enfin on verra si je ne me fait pas tirer les oreille en commencant un collection d'helico en su de la collection d'avion.
par ce qu'elle est pas commode la demoiselle desfois( j'espère qu'elle tombera pas sur mon post
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
Marc_30_34
- Chancelier Suprême
- Messages : 546
- Enregistré le : 11 janv. 2009, 20:27
Jette les avions mp moi ton tel ou ton msn, que je te previenne quand on vole dans le gard et passe sur le post du languedoc 
[img]http://goodies.heli4.com/icones/drapo_fr.png[/img] Sommières (30) - 25ans - [b]Padawan de Angels.arael[/b]
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
-
jprdragon

- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
Bonjour,
Ton idee est astucieuse ! .Mais il faut savoir que la vitesse du RAC est proportionnelle a la vitesse du RP . Donc en mettant un AC a pas variable , il faut que son moteur soit alimente en meme temps que celui du RP , qu'il tourne environ 5 fois plus vite , et que l'augmentation de sa vitesse soit proportionnelle a l'augmentation de la vitesse du RP .
Ca doit etre calculable tout ca .
Ton idee est astucieuse ! .Mais il faut savoir que la vitesse du RAC est proportionnelle a la vitesse du RP . Donc en mettant un AC a pas variable , il faut que son moteur soit alimente en meme temps que celui du RP , qu'il tourne environ 5 fois plus vite , et que l'augmentation de sa vitesse soit proportionnelle a l'augmentation de la vitesse du RP .
Ca doit etre calculable tout ca .
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
hé bien sachant que j'alimente mon RP par un brushless, donc je ne repique que la commande de gaz et n'en utilise pas la sortie puissance du 4 en1 esky, je pense qu'il serait possible de brancher tout simplement l'alimentation du rotor d'AC sur l'alimentation puissance du RP au 4 en 1. (avec un régulateur de tension si nécessaire) et de repiquer le signal de commande d'AC du 4 en 1 pour la commande du servo d'AC..
ce qui donnerais une montée en gaz proportionelle AC, RP, et en même temps une commande d'AC par servo contrôlée par le 4 en 1.
je pense que c'est vraiment faisable.. il faut que j'y réflechisse encore un peu, et que j'boive encore quelques cafés. bon allez
je me remet au travail je vais me faire engueuler sinon
ce qui donnerais une montée en gaz proportionelle AC, RP, et en même temps une commande d'AC par servo contrôlée par le 4 en 1.
je pense que c'est vraiment faisable.. il faut que j'y réflechisse encore un peu, et que j'boive encore quelques cafés
je me remet au travail je vais me faire engueuler sinon
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Heu oui et non. je sais pas trop en fait, il faudrait le vérifier.
Mais il me semble que la sortie signal de l'AC est tout de même bien gérée par le Gyro? Puisque ce signal au lieu d'attaquer un servo, attaque un transistor de puissance qui transforme ce signal en puissance, pour le RP ou l'AC.
Le gyro dois donc bien intervenir sur ce signal, enfin il faut que je revois le fonctionnement du 4 en 1 , je ne l'ai pas en tête, mais ce que tu dis est a vérifier,
Merci pour l'info, je creuserais cette piste en rentrant ce soir.
Mais il me semble que la sortie signal de l'AC est tout de même bien gérée par le Gyro? Puisque ce signal au lieu d'attaquer un servo, attaque un transistor de puissance qui transforme ce signal en puissance, pour le RP ou l'AC.
Le gyro dois donc bien intervenir sur ce signal, enfin il faut que je revois le fonctionnement du 4 en 1 , je ne l'ai pas en tête, mais ce que tu dis est a vérifier,
Merci pour l'info, je creuserais cette piste en rentrant ce soir.
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
jprdragon
- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
Bonjour,
Sur le 4X1 , le gyro commande la sortie puissance du moteur d'AC .
Dans ce que tu veux faire , il faut que cette sortie commande le servo d'AC , et que son moteur soit alimente par celui du RP . Le seul gros probleme c'est , pour pas que l'helico fasse la toupie lors du lancement du RP , il faut que le RAC compense au fure et a mesure , et de meme lors de l'arret du RP , c'est pour ca que sur un CP , la vitesse du RAC est proportionnelle au RP , le pas des pales est de 5 a 12° au neutre ,(suivant la vitesse des rotors) , et on met ou on enleve du pas que pour tourner ou stabiliser l'helico .
Sur le 4X1 , le gyro commande la sortie puissance du moteur d'AC .
Dans ce que tu veux faire , il faut que cette sortie commande le servo d'AC , et que son moteur soit alimente par celui du RP . Le seul gros probleme c'est , pour pas que l'helico fasse la toupie lors du lancement du RP , il faut que le RAC compense au fure et a mesure , et de meme lors de l'arret du RP , c'est pour ca que sur un CP , la vitesse du RAC est proportionnelle au RP , le pas des pales est de 5 a 12° au neutre ,(suivant la vitesse des rotors) , et on met ou on enleve du pas que pour tourner ou stabiliser l'helico .
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Bon et bien voila, après réflexion et etude plus approfondie de mon idée. je m'apercois de plusieurs chose.
la première c'est que le gyro et le mixeur ne sont pas dans la partie commande (récepteur) du 4 en 1 esky. mais dans la partie puissance! ( je ne sais pas pourquoi ils ont fait cela, ca me parait pas très logique!) enfin.
si je veux récupérer le signal de commande, il me le faut après le gyro et le mixeur. donc la ben y'as qu'a brancher l'oscilloscope et voir ce qu'on obtient comme signal a cet endroit et voir si c'est exploitable pour un servo. je ferais ca ce week end si le coeur m'en dit
cela dit, si cela fonctionne on pourra donc bien récupérer ce signal d'anticouple pour un servo, et la ca deviendra assez simple. il n'y aura plus qu'a récupérer la puissance depuis la sortie puissance moteur principal du 4 en 1, enfin juste a brancher le moteur d'anticouple dessus. et la partie sera presque gagnée tout au moins ca aura avancé.
Voila ou en est mon idée. après la partie mécanique ne devrait pas poser trop de problème.
bon ben dès que j'aurais avancer un peu plus? je mettrais de nouvelles info. pour l'instant il faut que je réflechisse a un banc d'essai par ce qu'etant donné mon niveau de pilotage. je ne me vois pas essayer cela directement sur ma machine
Bon y'as plus qu'a
la première c'est que le gyro et le mixeur ne sont pas dans la partie commande (récepteur) du 4 en 1 esky. mais dans la partie puissance! ( je ne sais pas pourquoi ils ont fait cela, ca me parait pas très logique!) enfin.
si je veux récupérer le signal de commande, il me le faut après le gyro et le mixeur. donc la ben y'as qu'a brancher l'oscilloscope et voir ce qu'on obtient comme signal a cet endroit et voir si c'est exploitable pour un servo. je ferais ca ce week end si le coeur m'en dit
cela dit, si cela fonctionne on pourra donc bien récupérer ce signal d'anticouple pour un servo, et la ca deviendra assez simple. il n'y aura plus qu'a récupérer la puissance depuis la sortie puissance moteur principal du 4 en 1, enfin juste a brancher le moteur d'anticouple dessus. et la partie sera presque gagnée tout au moins ca aura avancé.
Voila ou en est mon idée. après la partie mécanique ne devrait pas poser trop de problème.
bon ben dès que j'aurais avancer un peu plus? je mettrais de nouvelles info. pour l'instant il faut que je réflechisse a un banc d'essai par ce qu'etant donné mon niveau de pilotage. je ne me vois pas essayer cela directement sur ma machine
Bon y'as plus qu'a
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
jprdragon
- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
Bonjour,
Je n'ai que de faible connaissance en electronique , mais il me semble que le signal de commande des transistors de puissance doit etre identique a celui des servos . De plus ce signal de commande qui il me semble est hache en frequence ,est de la meme forme sur la sortie puissance des moteur , mais bien sur en tension plus eleve , donc en isolant cette tension par un condo , est que cela ferait pas l'affaire ? Car cette tension de commande du transistor ou sa sortie arrive bien du mixeur RP et gyro ,non? .
Allez sort l'oscillo !!!!!
Je n'ai que de faible connaissance en electronique , mais il me semble que le signal de commande des transistors de puissance doit etre identique a celui des servos . De plus ce signal de commande qui il me semble est hache en frequence ,est de la meme forme sur la sortie puissance des moteur , mais bien sur en tension plus eleve , donc en isolant cette tension par un condo , est que cela ferait pas l'affaire ? Car cette tension de commande du transistor ou sa sortie arrive bien du mixeur RP et gyro ,non? .
Allez sort l'oscillo !!!!!
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
RolluS

- Tuteur - Webmaster
- Messages : 13244
- Enregistré le : 31 déc. 2007, 00:55
- Contact :
Le module de Jonathan06 transformais le signal PWM en sorti de 4en1 en signal exploitable par un ESC, donc par un servo... Je ne sais pas si de tels modules circulent encore..
Ton idée est tout a fait bonne, d'ailleur en maquete dans les classes plus grande, certain montent un AC dit beltless, avec un moteur à l'AC, à pas variable... Cela évite les problème de passage des transmissions, ou de décalage du rotor d'ac etc..
Par contre effectivement au coup de la modif, peu être vaut mieux transformer le dm4 en compy...
Ton idée est tout a fait bonne, d'ailleur en maquete dans les classes plus grande, certain montent un AC dit beltless, avec un moteur à l'AC, à pas variable... Cela évite les problème de passage des transmissions, ou de décalage du rotor d'ac etc..
Par contre effectivement au coup de la modif, peu être vaut mieux transformer le dm4 en compy...
Besoin d'un tuteur? (¯`·._. ★ RolluS Academy ★ ._.·´¯)
Ma page perso: (¯`·._. RolluS Zone ._.·´¯)
 Kaos Technology Logo 630 FBL (destruction terminée
Kaos Technology Logo 630 FBL (destruction terminée  Phoenix 3.0
Phoenix 3.0  Hitec Aurora 9
Hitec Aurora 9-
Marc_30_34
- Chancelier Suprême
- Messages : 546
- Enregistré le : 11 janv. 2009, 20:27
Pour le 4en1 Filipe c'est pratique çà permet de les transformer facilement en 3en1 si on veut changer de récepteur ou passer en 2.4gHz
[img]http://goodies.heli4.com/icones/drapo_fr.png[/img] Sommières (30) - 25ans - [b]Padawan de Angels.arael[/b]
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
[img]http://goodies.heli4.com/icones/fp.png[/img] Compy FP BD
[img]http://goodies.heli4.com/icones/cp.png[/img] T-Rex 450 et HDX450 en montage
[img]http://goodies.heli4.com/icones/radio.png[/img]DX7
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Bon ben c'est à réflechir tout ca !!
Ce matin, tout va bien !!
09h00 je me lève, petit café et la j'allume la Tv pour regarder mes emission favorites (oui oui les dessins animés) même a 27 ans j'arrive pas à m'en défaire. et je ris toujours comme un gamin..
bref tout se passe bien. l'helico me regarde et me dit. ok t'as testé mon AC d'origine. a quand le pas variable?
Je lui répond donc. laisse moi finir mon café ! ( faut dresser ces petites bêtes)
( non non , je ne suis pas fou, mon helico me parle, bon ok avant j'etais skyso, mais depuis que je me soigne "On" va beaucoup mieux) !!
donc de ce pas j'avale le café descend a la cave, allume l'oscillo et....
rien .?!? ( je dois pas être reveillé)
J'allume le fer branché sur la même ralonge, il s'allume. bon ok.
fusible.... non apparement pas.
on débranche on rebranche. on re allume......
RIEN !! ca commence bien..
le tournevis criciforme n'as pas plus envie que moi d'ouvrir la boîte.
les mesure sont remises à plus tard.
Cela dit, ce que dit Jprdragon n'est pas faux ! et j'ai même bien envie de le vérifier .
mais je suppose que c'est tout a fait faisable. ce qui serais bien par ce qu'on pourrait avoir un rotor d'AC a pas variable, avec seulement le poid de la mécanique (un peux de carbonne un servo, un axe et deux biellettes...
pas de gyro nécessaire en su..
oué oué oué.. j'va tenter de sortir du lit un collègue qui a un oscillo qui marche
Ce matin, tout va bien !!
09h00 je me lève, petit café et la j'allume la Tv pour regarder mes emission favorites (oui oui les dessins animés) même a 27 ans j'arrive pas à m'en défaire. et je ris toujours comme un gamin..
bref tout se passe bien. l'helico me regarde et me dit. ok t'as testé mon AC d'origine. a quand le pas variable?
Je lui répond donc. laisse moi finir mon café ! ( faut dresser ces petites bêtes)
( non non , je ne suis pas fou, mon helico me parle, bon ok avant j'etais skyso, mais depuis que je me soigne "On" va beaucoup mieux)
donc de ce pas j'avale le café descend a la cave, allume l'oscillo et....
rien .?!? ( je dois pas être reveillé)
J'allume le fer branché sur la même ralonge, il s'allume. bon ok.
fusible.... non apparement pas.
on débranche on rebranche. on re allume......
RIEN !! ca commence bien..
le tournevis criciforme n'as pas plus envie que moi d'ouvrir la boîte.
les mesure sont remises à plus tard.
Cela dit, ce que dit Jprdragon n'est pas faux ! et j'ai même bien envie de le vérifier .
mais je suppose que c'est tout a fait faisable. ce qui serais bien par ce qu'on pourrait avoir un rotor d'AC a pas variable, avec seulement le poid de la mécanique (un peux de carbonne un servo, un axe et deux biellettes...
pas de gyro nécessaire en su..
oué oué oué.. j'va tenter de sortir du lit un collègue qui a un oscillo qui marche
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
jprdragon
- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
Bonjour,
Pas de bol !!! Tes essais m'interesse !!!! J'ai l'envie de transformer mon Caliber en brusless , j'ai les deux moteurs et controleurs , mais ce qui me retiens de faire cette transformation , c'est d'abord le pignion moteur a trouve (meme denture) ,puis le branchement des controleurs sur la sortie puissance du recepteur, car je ne veux pas dessocer le recepteur , j'ai eu trop de mal a en trouver un d'origine , neuf 120 Euros !.
Pas de bol !!! Tes essais m'interesse !!!! J'ai l'envie de transformer mon Caliber en brusless , j'ai les deux moteurs et controleurs , mais ce qui me retiens de faire cette transformation , c'est d'abord le pignion moteur a trouve (meme denture) ,puis le branchement des controleurs sur la sortie puissance du recepteur, car je ne veux pas dessocer le recepteur , j'ai eu trop de mal a en trouver un d'origine , neuf 120 Euros !.
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
En fait; effectivement le module de jonathan avec le PIC 16f réinterpretait le signal de puissance:RolluS @ 28 Mar 2009, à 17:07 a écrit : Le module de Jonathan06 transformais le signal PWM en sorti de 4en1 en signal exploitable par un ESC, donc par un servo... Je ne sais pas si de tels modules circulent encore..
Ton idée est tout a fait bonne, d'ailleur en maquete dans les classes plus grande, certain montent un AC dit beltless, avec un moteur à l'AC, à pas variable... Cela évite les problème de passage des transmissions, ou de décalage du rotor d'ac etc..
Par contre effectivement au coup de la modif, peu être vaut mieux transformer le dm4 en compy...
alors je part un peu sur des supositions car je n'ai pas de quoi mesurer sous la main. mais voila comment je pense que cela fonctionne.
de la voie d'anticouple par un signal MLI? avec un rapport Cyclique de 20 milli secondes. l'information sur la voie circulant sur 2milliseconde.
ce signal passe par le gyro. qui mixe ou pas. ce signal avec le sien. ou implémente les deux tout simplement. mais la c'est a vérifier;
par contre ce signal ayant un rapport cyclique de 20 milliseconde n'est pas interprétable par un controleur brushless, ou un transistor de puissance. et encore moins s'il est destiné a un moteur.
lors ce que l'on met le moteur en marche on s'en rend compte. on entend ce petit siflement aigue, qui est audible, donc plutot sur une fréquence de 1Khz, au lieu des 50Hz du signal MLI de référence.
Je pense que le mixeur est ce Micro p (20 pattes) que l'on trouve dans la partie puissance en dessous des deux potentionnetre de réglage de L'AC.
Celui ci doit traiter le signal Mli de référence provenant du gyro. et l'élever en fréquence, (environ 1Khz) pour le renvoyer au transistor de puissance qui lui l'amplifie pour le moteur. ce traitement et ou numérique ou analogique( je préfererais la deuxième solution, c'est plus silmmple pour moi
le montage de Jonathan devait réinterpréter ce signal en redécoupant celui ci selon un rapport cyclique interprétable par un servos soit une periode de 20Milli secondes.
mais voila. dans ce signal on a aussi le signal de la voie de gaz. dont on aurait aps besoin puisque le moteur d'AC serait alimenté par la sortie puissance du moteur principale. vu que celui ci est en brushless donc n'utilise pas cette sortie.
mais comment se débarasser de ce signal de la voie de Gaz. et bien. il faut que je plante l'oscillo un peu partout afin de voir ce qu'il y a comme signaux; et comment ceux ci sont traités.
La dessus un amis va m'aider il est bien plus a l'aise que moi avec toutes ces opérations. mais je met les infos a disposition dès que je les ai.!!
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
akoirium

- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
bon allé j'arrive moi aussi sur ce post...
je n'avais pas lus tes derniéres conclusions et je suis maintenant interesser par tes recherches...
de mon coté, j'aimerais recuperrer les signaux PWM des gaz pour un esc, et PWM en sortie de gyro (si il y as bien du pwm) pour un servo et transformer un 4en1 2.4ghz de birotor en 4en1 pour FP belt-drive.
je peu egallement disposer d'un oscillo, mais je ne l'ai pas sous la main pour l'instant
bref je suit tout ca avec grand interet et j'essaiyeras d'apporter ma pierre a l'edifice dés que je recupére l'oscilo.
bon je pourais bien tenter de trouver les signaux avec un servo alimenté et en balladant sa borne pwm un peu partout sur le circuit, mais j'ai plus de chance de le griller que de trouver le signal
Edit:
je viens de rejetter un coup d'oeil a mon 4en1 de bi...
bhen il est blindé de "TP" (test point) ....
il doit bien y en avoir 2 dans le lot pour les signaux pwm gaz et AC ... et avec de la chance un troisiéme pour le signal pwm en sortie de gyro")
bon faut que je recupére l'oscillo
je n'avais pas lus tes derniéres conclusions et je suis maintenant interesser par tes recherches...
de mon coté, j'aimerais recuperrer les signaux PWM des gaz pour un esc, et PWM en sortie de gyro (si il y as bien du pwm) pour un servo et transformer un 4en1 2.4ghz de birotor en 4en1 pour FP belt-drive.
je peu egallement disposer d'un oscillo, mais je ne l'ai pas sous la main pour l'instant
bref je suit tout ca avec grand interet et j'essaiyeras d'apporter ma pierre a l'edifice dés que je recupére l'oscilo.
bon je pourais bien tenter de trouver les signaux avec un servo alimenté et en balladant sa borne pwm un peu partout sur le circuit, mais j'ai plus de chance de le griller que de trouver le signal
Edit:
je viens de rejetter un coup d'oeil a mon 4en1 de bi...
bhen il est blindé de "TP" (test point) ....
il doit bien y en avoir 2 dans le lot pour les signaux pwm gaz et AC ... et avec de la chance un troisiéme pour le signal pwm en sortie de gyro
bon faut que je recupére l'oscillo
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
je crois avoir une piste a explorer :
circuits.epanorama.net/circuits/servo10v.html
un petit schema a base de timer NE555 pour controler un servo clasique en tension 0-10V
donc pas besoin de programmation, ni d'ouvrir le 4en1...
il suffierat alors d'utiliser les sorties puissance du 4en1 (qui sont des 0-7.4v ou 0-11.1v selon la lipo) pour les convertire en signaux PWM exploitable par un esc ou un servo
il faudras peut etre prevoir une resistance variable sur le module de conversion de l'AC de facon a pouvoir ajuster la course et le neutre du servo en fonction de la lipo, mais je pensse que c'est jouable.
par contre ceci ne fonctionnera pas pour mon 4en1 de birotor mais pour un 4en1 de FP ca doit le faire
edit :
un autre schema a basse de ne555 et en francais
nettronik.goldzoneweb.info/modules/....php?storyid=17
par contre ce dernier est en fontionnement tout ou rien (donc 2 positions seullement et 0 et 5v...
mais ca peut aider a comprendre le principe
circuits.epanorama.net/circuits/servo10v.html
un petit schema a base de timer NE555 pour controler un servo clasique en tension 0-10V
donc pas besoin de programmation, ni d'ouvrir le 4en1...
il suffierat alors d'utiliser les sorties puissance du 4en1 (qui sont des 0-7.4v ou 0-11.1v selon la lipo) pour les convertire en signaux PWM exploitable par un esc ou un servo
il faudras peut etre prevoir une resistance variable sur le module de conversion de l'AC de facon a pouvoir ajuster la course et le neutre du servo en fonction de la lipo, mais je pensse que c'est jouable.
par contre ceci ne fonctionnera pas pour mon 4en1 de birotor mais pour un 4en1 de FP ca doit le faire
edit :
un autre schema a basse de ne555 et en francais
nettronik.goldzoneweb.info/modules/....php?storyid=17
par contre ce dernier est en fontionnement tout ou rien (donc 2 positions seullement et 0 et 5v...
mais ca peut aider a comprendre le principe
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
jprdragon
- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
Ca avance ! c'est bien . Et pourquoi cela ne fonctionnerai pas sur ton birotor ?.
En mettant deux brushless et bien sur deux NE555. Le birotor a le meme fonctionnement qu'un pas fixe avec rotor d'AC.
En mettant deux brushless et bien sur deux NE555. Le birotor a le meme fonctionnement qu'un pas fixe avec rotor d'AC.
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Et non ! malheureusement !....
l'anticouple d'un bi fonctionne differement (enfin il me semble)...
si je ne dis pas de connerie sur un bi, un des rotor ralentis et l'autre accelére et vice versa pour la fonction anticouple.
alors qu'avec un FP le rotor principale tourne a vitesse constante et on ralentis ou accelére le rotor d'ac uniquement.
bon je ne suis pas sûr de ce que j'avance mais c'est ce qui me parais le plus logique en terme de consomation et d'efficacitée pour la fonction anticouple d'un birotor.
donc pour la modif d'un 4en1 de bi on retombe sur le pb de trouver des signaux PWM.
par contre pour un 4en1 de fp ca doit marcher mais pour ca faut essayier
l'anticouple d'un bi fonctionne differement (enfin il me semble)...
si je ne dis pas de connerie sur un bi, un des rotor ralentis et l'autre accelére et vice versa pour la fonction anticouple.
alors qu'avec un FP le rotor principale tourne a vitesse constante et on ralentis ou accelére le rotor d'ac uniquement.
bon je ne suis pas sûr de ce que j'avance mais c'est ce qui me parais le plus logique en terme de consomation et d'efficacitée pour la fonction anticouple d'un birotor.
donc pour la modif d'un 4en1 de bi on retombe sur le pb de trouver des signaux PWM.
par contre pour un 4en1 de fp ca doit marcher mais pour ca faut essayier
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
jprdragon
- - Ancien du Forum -
- Messages : 10030
- Enregistré le : 28 avr. 2006, 07:01
- Localisation : Grenoble 38000
thesteve.ca/walkera/install-diagram...-full;init:.jpg
Tiens ,j'ai trouve ca . Il me semble que le birotor fonctionne comme un FP , a controler .
Tiens ,j'ai trouve ca . Il me semble que le birotor fonctionne comme un FP , a controler .
- Jean-Paul - Grenoble -
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
- Hélicos : Caliber M 24 - DF 36 - Lama SA 315 B Thermique.
- Modo sur Heli4 en 2006, 2007, 2008.
(Parler beaucoup est une chose,parler a bon escient en est une autre .SOPHOCLE)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
HUMMMM tres interessant ce lien...
malheureusement, c'est l'heure de l'apero et je ne suis pas vraiment en etats de l'etudier serieusement ...
mais ca reviens a ce que je disait.... le walkera 4#3 est un FP... pas un birotor donc le module a base de ne555 fonctionne aussi sur cet helico...(si je ne dis pas de conneries bien sûr !)...
pour les 4en1 de birotor, je suis sur que c'est fesable mais ca seras SOIT un poil plus compliquer, soit aussi simple que pour un fp selon la conception du 4en1 SI ils utilisent un protocole standard du type PWM de recepteur...
Edit : quand je dis birotor... le but c pas de faire un bi full brushless... ca je m'en tape royallement... , mais bien de transformé un 4en1 de bi POUR un FP
malheureusement, c'est l'heure de l'apero et je ne suis pas vraiment en etats de l'etudier serieusement
mais ca reviens a ce que je disait.... le walkera 4#3 est un FP... pas un birotor donc le module a base de ne555 fonctionne aussi sur cet helico...(si je ne dis pas de conneries bien sûr !)...
pour les 4en1 de birotor, je suis sur que c'est fesable mais ca seras SOIT un poil plus compliquer, soit aussi simple que pour un fp selon la conception du 4en1 SI ils utilisent un protocole standard du type PWM de recepteur...
Edit : quand je dis birotor... le but c pas de faire un bi full brushless... ca je m'en tape royallement...
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
voila dejas un peu plus d'explications sur ce dernier lien :
thesteve.ca/walkera/
mais bon chaque modif est unique en fonction du 4en1 ...
enfin ca seras toujours utile aux "bidouilleurs fous" de 4en1 de 4#3...
de mon coté je sent qu'il vas faloir que je fouille la cave de ma tante pour resortir mon oscillo, ainssi que mon bateau RC et tout mon matos modelisme que j'avais mis de coté
thesteve.ca/walkera/
mais bon chaque modif est unique en fonction du 4en1 ...
enfin ca seras toujours utile aux "bidouilleurs fous" de 4en1 de 4#3
de mon coté je sent qu'il vas faloir que je fouille la cave de ma tante pour resortir mon oscillo, ainssi que mon bateau RC et tout mon matos modelisme que j'avais mis de coté
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Hello tout le monde.
que voila plein d'interessantes choses interessantes. et un indémodable ne555 qui fait son retour!
bien en fait je ne connais pas vraiment le fonctionnement du bi rotor, mais j'imagine qu'il y a deux moteurs, .
Si on peu chopper le signal PWM ou MLI, c'est pareil un en anglais , un en francais, bonnet blanc et blanc bonnet en fait, avant l'amplification en signal puissance c'est tout bénéf.
Je ne sais pas s'il y a un "mixage" lacet gaz pour un birotor. je pense que c'est même encore plus simple. j'essayerais de voir si je trouve des docs la dessus. si quelqun a déja.. ouvert les entrailles de ces bêtes..
mais a mon avis, on a l'equivalent du schéma de deux rotor d'AC,
tout deux commandé par la voie de Gaz, mais modulés par le gyro, implémenté ou non du signal de lacet! on a que deux commandes de puissance modulées en fait !
Ce qui est embétant dans ces montages, c'est qu'on ne sais pas ce qui sort de ces micro chips, sauf si on le mesure, et pour ca il faut un oscillo, le signal pouvant être mixé analogiquement ou numériquement, et modifié en fréquence comme souhaité. mais la en dehors des mesure rien ne nous le dira.
c'est également valable pour le signal sortant du gyro! ca peut etre du Mli. ou pas!
bon a vrai dire. j'ai pas encore trop penché sur le module qui permettrait cette convertion de signal de puissance en signal de commande, car une autre idée m'est venue pour l'AC à pas variable.
Mais la encore, ce montage a base de Ne555 pourrais faire l'affaire. a une condition! que l'on sache ce que l'on a comme signal en sortie! et sur quelle modulation d'impulsion il à subit
il faut que j'explore les deux sujet!
.( je reviens sur le DM4).
J'utilise mon signal de gaz pour contrôler mon esc brushless rotor principal. jusque la, pas de souci.
Mais...mon idée a évoluée comme ca depuis le début de mon post. ( il me faut un oscillo pour confirmer cette thèse, et ca sera pas avant ce week end mais.; on vérra bien)
le signal de voie de lacet ( et la c'est du MLI) par en direction du Gyro, puis traverse celui ci pour aller vers le micro chip qui module ce signal pour gérer l'anticouple en "GAZ". mais entre le gyro et le Micro chip, qu'a on comme signal?
bien l'oscillo dira ca (j'en profiterais pour faire d'autre mesures évidement)
Mais si c'est le MLI de référence , adapté à une commande de servo, ben c'est parfait en fait! je m'explique.
Ce signal repiqué directement pourrais commander un servo d'AC! mais comment alimenter le moteur d'AC alors?
Bien simplement avec l'ancienne sortie puissance moteur principal !
hé oui, comme ca on a une syncro parfaite ou presque! et le gyro agirait alors comme un gyro normal sur le servo de commande AC ! donc AC à pas variable !
Mes constats sur l'AC pas fixe : ( sans D-Drive)
- on alimente en 11.1V, on a une suralimentation du petit moteur qui chauffe trop.
- le rapport de puissance AC / RP n'est pas forcément conservé, on syncronise un peu au mieu les deux (trim, modif de courbes..changement Hélice etc)
- le gyro "oscille" un peu, le temps de latence du a l'inertie du moteur, de la motoréduction, et du temps de réponse dud system AC fait que la réaction du gyro n'est pas forcément proportionnelle au besoin rééls.
- En 11.1v, on atteind a 80 ou 85% le rapport cyclique maximum de l'AC !!
si si vérifiez! cette petite led verte sur le 4 en 1 esky, qui a partir d'un certain niveau de Gaz pour ceux qui alimentent en 11.1V passe au rouge! c'est le rapport cyclique max engagé, au dela de ce point, votre rotor principal tournera plus vite encore, mais pas le rotor d'anticouple !!! (faites le test)
donc, plein de petits points qui peuvent être améliorés!
Mes déductions sur l'AC pas variable :
- on atteind pas le rapport cyclique maximum, la vitesse de rotation plus élevée donnant lieu à une assez faible correction de pas!
- le temps de réaction de l'AC et plus rapide ! le liens entre l'action du gyro et l'action de l'AC etant devenu en grande partie mécanique, donc beaucoup moins d'inertie! plus de précision! on évite alors l'effet d'oscillation de notre petit gyro.
- par les réglages mécaniques ( bras de levier de commande, de servos etc.) on peut régler la réactivité souhaitée sur L'AC, pilote confirmé ou comme moi pilote en herbe !
Hé puis on se rapproche un peu d'un helico plus sein à piloter! et on est d'autant plus content que ce résultat est le notre ! (le modelisme c'est aussi le plaisir de bidouiller et construire)
donc ce projet et en phase de devenir plus que réalisable !
alors certes, vous me direz, pourquoi pas passer au compy directement?
c'est simple! le compy c'est du tout fait ! et j'prefere faire en partie moi même! c'est tout aussi interessant! même si c'est pas forcément toujours plus économique!
Et puis on reste sur un DF4 ! on garde la base, et on la fait évoluer pour qu'elle nous donne le meilleur !car elle peut donner mieux c'est sur !
Info tech :
MLI : Modulation de Largeur d'Impulsion
PWM : Pulse Width Modulation
que voila plein d'interessantes choses interessantes. et un indémodable ne555 qui fait son retour!
bien en fait je ne connais pas vraiment le fonctionnement du bi rotor, mais j'imagine qu'il y a deux moteurs, .
Si on peu chopper le signal PWM ou MLI, c'est pareil un en anglais , un en francais, bonnet blanc et blanc bonnet en fait, avant l'amplification en signal puissance c'est tout bénéf.
Je ne sais pas s'il y a un "mixage" lacet gaz pour un birotor. je pense que c'est même encore plus simple. j'essayerais de voir si je trouve des docs la dessus. si quelqun a déja.. ouvert les entrailles de ces bêtes..
mais a mon avis, on a l'equivalent du schéma de deux rotor d'AC,
tout deux commandé par la voie de Gaz, mais modulés par le gyro, implémenté ou non du signal de lacet! on a que deux commandes de puissance modulées en fait !
Ce qui est embétant dans ces montages, c'est qu'on ne sais pas ce qui sort de ces micro chips, sauf si on le mesure, et pour ca il faut un oscillo, le signal pouvant être mixé analogiquement ou numériquement, et modifié en fréquence comme souhaité. mais la en dehors des mesure rien ne nous le dira.
c'est également valable pour le signal sortant du gyro! ca peut etre du Mli. ou pas!
bon a vrai dire. j'ai pas encore trop penché sur le module qui permettrait cette convertion de signal de puissance en signal de commande, car une autre idée m'est venue pour l'AC à pas variable.
Mais la encore, ce montage a base de Ne555 pourrais faire l'affaire. a une condition! que l'on sache ce que l'on a comme signal en sortie! et sur quelle modulation d'impulsion il à subit
il faut que j'explore les deux sujet!
.( je reviens sur le DM4).
J'utilise mon signal de gaz pour contrôler mon esc brushless rotor principal. jusque la, pas de souci.
Mais...mon idée a évoluée comme ca depuis le début de mon post. ( il me faut un oscillo pour confirmer cette thèse, et ca sera pas avant ce week end mais.; on vérra bien)
le signal de voie de lacet ( et la c'est du MLI) par en direction du Gyro, puis traverse celui ci pour aller vers le micro chip qui module ce signal pour gérer l'anticouple en "GAZ". mais entre le gyro et le Micro chip, qu'a on comme signal?
bien l'oscillo dira ca (j'en profiterais pour faire d'autre mesures évidement)
Mais si c'est le MLI de référence , adapté à une commande de servo, ben c'est parfait en fait! je m'explique.
Ce signal repiqué directement pourrais commander un servo d'AC! mais comment alimenter le moteur d'AC alors?
Bien simplement avec l'ancienne sortie puissance moteur principal !
hé oui, comme ca on a une syncro parfaite ou presque! et le gyro agirait alors comme un gyro normal sur le servo de commande AC ! donc AC à pas variable !
Mes constats sur l'AC pas fixe : ( sans D-Drive)
- on alimente en 11.1V, on a une suralimentation du petit moteur qui chauffe trop.
- le rapport de puissance AC / RP n'est pas forcément conservé, on syncronise un peu au mieu les deux (trim, modif de courbes..changement Hélice etc)
- le gyro "oscille" un peu, le temps de latence du a l'inertie du moteur, de la motoréduction, et du temps de réponse dud system AC fait que la réaction du gyro n'est pas forcément proportionnelle au besoin rééls.
- En 11.1v, on atteind a 80 ou 85% le rapport cyclique maximum de l'AC !!
si si vérifiez! cette petite led verte sur le 4 en 1 esky, qui a partir d'un certain niveau de Gaz pour ceux qui alimentent en 11.1V passe au rouge! c'est le rapport cyclique max engagé, au dela de ce point, votre rotor principal tournera plus vite encore, mais pas le rotor d'anticouple !!! (faites le test)
donc, plein de petits points qui peuvent être améliorés!
Mes déductions sur l'AC pas variable :
- on atteind pas le rapport cyclique maximum, la vitesse de rotation plus élevée donnant lieu à une assez faible correction de pas!
- le temps de réaction de l'AC et plus rapide ! le liens entre l'action du gyro et l'action de l'AC etant devenu en grande partie mécanique, donc beaucoup moins d'inertie! plus de précision! on évite alors l'effet d'oscillation de notre petit gyro.
- par les réglages mécaniques ( bras de levier de commande, de servos etc.) on peut régler la réactivité souhaitée sur L'AC, pilote confirmé ou comme moi pilote en herbe !
Hé puis on se rapproche un peu d'un helico plus sein à piloter! et on est d'autant plus content que ce résultat est le notre ! (le modelisme c'est aussi le plaisir de bidouiller et construire)
donc ce projet et en phase de devenir plus que réalisable !
alors certes, vous me direz, pourquoi pas passer au compy directement?
c'est simple! le compy c'est du tout fait ! et j'prefere faire en partie moi même! c'est tout aussi interessant! même si c'est pas forcément toujours plus économique!
Et puis on reste sur un DF4 ! on garde la base, et on la fait évoluer pour qu'elle nous donne le meilleur !car elle peut donner mieux c'est sur !
Info tech :
MLI : Modulation de Largeur d'Impulsion
PWM : Pulse Width Modulation
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Ce qui est embétant dans ces montages, c'est qu'on ne sais pas ce qui sort de ces micro chips, sauf si on le mesure, et pour ca il faut un oscillo, le signal pouvant être mixé analogiquement ou numériquement, et modifié en fréquence comme souhaité. mais la en dehors des mesure rien ne nous le dira.
detrompe toi !... le net est un outils formidable et il n'y as rien de plus facile de trouver a quoi correspnds un chip sur le net.
pour cela il suffit de taper sous google la reference du composant qui nous interesse, suivis eventuellement du terme "DataSheet" ... et hop !!! tu sait a quoi ca sert...(a condition de comprendre un minimum l'anglais technique...)
j'ai meme reussi a trouver un datasheet equivalent au gyro de ma patate volante !
lors certes, vous me direz, pourquoi pas passer au compy directement?
c'est simple! le compy c'est du tout fait ! et j'prefere faire en partie moi même! c'est tout aussi interessant! même si c'est pas forcément toujours plus économique!
Et puis on reste sur un DF4 ! on garde la base, et on la fait évoluer pour qu'elle nous donne le meilleur !car elle peut donner mieux c'est sur !
justement c'est ce que j'alais dire !!!
et c'est tout a ton honeur...
si non je me rabaterais sur le compy FP-DD...
concernant les signaux... toi tu dis MLI, moi je dis PWM... donc kifkif si j'ai bien compris.
enssuite, a force de bidouiller de ci de la...je commence a les conaitre nos amis chinois
et il y as tres peu de chance qu'ils se soient ammusés a developer un protocole proprietaire en sortie de gyro...
si non comment ferais-t-ils pour faire des contrefacons aussi efficasse dans tout les domaines
il est donc fort probable que quelque soit le 4en1, on ai un siglal pwm (ou mli
il ne reste plus qu'a le trouver ...
concernant le montage a base de NE555, j'ai de grands espoirs concernant le 4en1 d'un FP... mais de forts doutes concernant un 4en 1 de bi...
bon j'aurais confirmation demain avec un coup de multimetre pour voir si les 2 moteurs sont commandés pour l'anticouple ou seullement un seul...mais il ne faut pas s'attendre a des miracles de ce coté la...
a mon avis on auras jamais mieux qu'avec un repiquage des sigaux pwm exploitablent par un servo ou un esc.
ps: tu dis que tu est en electronique walkera et que tu as repiquer le signal pwm des gaz pr ton moteur principale... perso ca m'interesse car je n'ai trouver nulle par cette modif et je suis bien interesser...
quel tupe de 4en1 as-tu ? 35 /40/ 41 /72 Mhz....aurais tu un lien vers la modif ou une petite photo avec les points de repiquage pour l'esc ???
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Heu. bien non, en fait j'ai l'electronique esky pour mon 4 en 1. l'electronic walkera etais avec ( je l'ai pris d'occasion) mai sje suis passé de suite sur l'electronique esky, après avoir lu quelques post sur Heli4.
surtout que j'ai que des batteries 11.1V, heritées de l'avion. donc.. j'ai pas pris de risques
en réalité, je n'ai aps gardé grand chose du df4 d'origine. si ce n'est le corp, l'axe, et tout le rotor de queue.
j'essayerais de voir si je trouve quelques infos sur les 4 en 1 de birotor ce week, si j'ai un peu de temps.
Il faudrait vraiment savoir ce qui sort de ces petits 4 en 1 pour pouvoir les modifier à souhait.
c'est probablement faisable! le principe de fonctionnement etant le même..
a etudier a etudier...
PS : il n'y a aucune mistère de 4 en 1 qu'un oscillo ne saurait percer !!
pour les datasheet sur le net, c'est en effet vrai. peu reste introuvable. mais le problème que l'on a la, c'est que c'est un micro P qui fait le mixage des voies et du gyro. et le programme dedans?. ben la cacahuette pour l'avoir ^^
mais bon quand ducros se décarcasse, parfois.. ca donne des miracles..
ou de la moutarde..
Mais de la moutarde sur un helico..
surtout que j'ai que des batteries 11.1V, heritées de l'avion. donc.. j'ai pas pris de risques
en réalité, je n'ai aps gardé grand chose du df4 d'origine. si ce n'est le corp, l'axe, et tout le rotor de queue.
j'essayerais de voir si je trouve quelques infos sur les 4 en 1 de birotor ce week, si j'ai un peu de temps.
Il faudrait vraiment savoir ce qui sort de ces petits 4 en 1 pour pouvoir les modifier à souhait.
c'est probablement faisable! le principe de fonctionnement etant le même..
a etudier a etudier...
PS : il n'y a aucune mistère de 4 en 1 qu'un oscillo ne saurait percer !!
pour les datasheet sur le net, c'est en effet vrai. peu reste introuvable. mais le problème que l'on a la, c'est que c'est un micro P qui fait le mixage des voies et du gyro. et le programme dedans?. ben la cacahuette pour l'avoir ^^
mais bon quand ducros se décarcasse, parfois.. ca donne des miracles..
ou de la moutarde..
Mais de la moutarde sur un helico..
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
P----e
- Chevalier Jedi
- Messages : 1408
- Enregistré le : 08 janv. 2009, 19:09
- Localisation : dans mon slip pourquoi????
juste une petite idée pour la suite.....
il existe en avion indoor des systeme d'hélice a pas variable. en indoor on cherche le gain de poid un max, ça ne doit pas peser lourd.
une autre idée. étant a pas variable, ne serait 'il pas possible plutot que d'utiliser le signal pour un varitateur et un servo d'alimenter un variateur avec un signal continu qui ferait tourner le moteur a vitesse constante et utiliser le signal pour le servo de l'ac???
sinon, autre solution:
le GWS branché sur le moteur principal pour etre au max de puissance et avec un module comme jojo a fait controler uniquement qu'un servo avec la puissance sortant des fil d'origine pour le moteur d'ac..... en fesant ainsi, on récupere pour le servo les correction du gyro en meme temps que la commande du manche transformé en signal grace au module et le moteur sera alimenté lui par le meme variateur que le moteur principal...
bref, je viens juste de chopper le sujet en cour, j'avais pas vu avant, aussi désolé si j'ai parlé pour rien dire.... j'espere avoir aidé a donner des idée...
il existe en avion indoor des systeme d'hélice a pas variable. en indoor on cherche le gain de poid un max, ça ne doit pas peser lourd.
une autre idée. étant a pas variable, ne serait 'il pas possible plutot que d'utiliser le signal pour un varitateur et un servo d'alimenter un variateur avec un signal continu qui ferait tourner le moteur a vitesse constante et utiliser le signal pour le servo de l'ac???
sinon, autre solution:
le GWS branché sur le moteur principal pour etre au max de puissance et avec un module comme jojo a fait controler uniquement qu'un servo avec la puissance sortant des fil d'origine pour le moteur d'ac..... en fesant ainsi, on récupere pour le servo les correction du gyro en meme temps que la commande du manche transformé en signal grace au module et le moteur sera alimenté lui par le meme variateur que le moteur principal...
bref, je viens juste de chopper le sujet en cour, j'avais pas vu avant, aussi désolé si j'ai parlé pour rien dire.... j'espere avoir aidé a donner des idée...
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
surtout que j'ai que des batteries 11.1V, heritées de l'avion. donc.. j'ai pas pris de risques
bhen selon le 4en1 walkera, certains ont les mosfet doublés d'origine pour le moteur principale donc aucun soucis en 3s...
si j'avais pris le temps de regarder sur le miens avant de cramer mes mosfets avec un speed 300, je serais passé directement en 3s avec moteur d'origine
bon ce qui est fait est fait et maintenant mon 4en1 peut encaisser 50A sur le RP et 12 A sur l'AC
j'essayerais de voir si je trouve quelques infos sur les 4 en 1 de birotor ce week, si j'ai un peu de temps.
Il faudrait vraiment savoir ce qui sort de ces petits 4 en 1 pour pouvoir les modifier à souhait.
c'est probablement faisable! le principe de fonctionnement etant le même..
pour les 4en 1 de bi sur un FP, te casse pas la tete...je m'en charge
je me suis dejas asser fait chié pour changer mes mosfets sur le walkera alors pr l'instant j'y touche plus et je m'attaque au recyclage de ma "patate volante"
mais comme je l'ai dis, la solution ultime qui a les plus de chance de fonctionner sur ces 2 types de 4en1 reste le repiquage des signaux pwm.
bien sur le montage a base de ne555 fonctinerais pour un bi full brushless mais pas a la modif en 4en1 de fp...enfin je doute...je confirmerais ca demain
c'est un micro P qui fait le mixage des voies et du gyro. et le programme dedans?. ben la cacahuette pour l'avoir ^^
effectivement si il y as un pic la c'est mort pour savoir comment ca tourne a l'interrieur...
mais jusque la j'en ai pas encore vus...
dans mon 4en1 aztech 2.4ghz, le chip principale est un "bette" controleur 8 bit....et pas un pic programmable.
bon j'ai mis "bette" entre guillemets car pour moi ce genre de chip est loins d'etre simple et il me faudrais bien toute une caisse d'aspirine pour venir a bout du datasheet....
et suivis d'une caisse de biéres et d'un enorme petard pour decompresser
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
une autre idée. étant a pas variable, ne serait 'il pas possible plutot que d'utiliser le signal pour un varitateur et un servo d'alimenter un variateur avec un signal continu qui ferait tourner le moteur a vitesse constante et utiliser le signal pour le servo de l'ac???
sinon, autre solution:
le GWS branché sur le moteur principal pour etre au max de puissance et avec un module comme jojo a fait controler uniquement qu'un servo avec la puissance sortant des fil d'origine pour le moteur d'ac..... en fesant ainsi, on récupere pour le servo les correction du gyro en meme temps que la commande du manche transformé en signal grace au module et le moteur sera alimenté lui par le meme variateur que le moteur principal...
ces 2 solutions son en fait la problématique du montage a base de ne555 que j'ai trouvé plus haut
et oui il y as de grandes chances pour que ca marche.
mais l'ideal pour eviter toute pertes ou perturbations due au module de conversion, serais justement de s'en passer et de recuperer le signal dirrectement dans le 4en1.
on sais qu'un recepteur (inclus dans le 4en1) fournis 4 voie en PWM comme un recepteur clasique ...puis 2 de ces voies sont traitées par le reste de l'electronique de facon a avoir 2 commandes de puissance moteur.
le coup du module c'est bien car pas besoin d'ouvrir le 4en1 (quoique <_< ...) mais ca reviendrais a convertir un signal PWM en 0/7.4 ou 11.1V puis le reconvertir en pwm...
autant tenter d'aller dirrectement a la source
de plus avec un module a base de ne555, on est dependant de la tension de la lipo...
ca n'est pas trop grave pour les gaz ... mais pour l'ac en fonction de la decharge de la lipo, il se peut quela difference de tension rende la bette incontrolable en debut et fin de lipo ....a voir egallement <_<
alors que le signal pwm "source" lui ne bouge pas quelque soit l'etat de la lipo
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Bon alors...
j'ai sortis mon multimétre pour verifier le fonctionnement de l'anticouple sur le 4en1 d'un birotor...
bhen c'est bien ce que je penssait... un rotor accelére et l'autre ralentis lorsque l'on manoeuvre l'anticouple.
donc l ne faut pas espérer faire marcher un 4en1 de bi sur un FP sans modifications
par contre je ne perds pas espoir de trouver les signaux pwm et la ca serais tout bon !!!
j'ai sortis mon multimétre pour verifier le fonctionnement de l'anticouple sur le 4en1 d'un birotor...
bhen c'est bien ce que je penssait... un rotor accelére et l'autre ralentis lorsque l'on manoeuvre l'anticouple.
donc l ne faut pas espérer faire marcher un 4en1 de bi sur un FP sans modifications
par contre je ne perds pas espoir de trouver les signaux pwm et la ca serais tout bon !!!
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
Jonathan06

- DARK VADOR
- Messages : 6034
- Enregistré le : 26 août 2007, 23:23
- Localisation : Nice
- Contact :
A l'air interessé ce sujet, dommage que j'ai pas le temps de tout lire, pas le temps
J'ai parcouru en diagonal, et je peux dire que le montage a base de NE555 et a jetter a la poubelle, car la tension n'etant pas stable a cause du moteur le signal issue du Ne555 ne le sera pas non plus, c'est pour ca que je me suis basé sur un circuit logic qui mesure la largeur d'impulsion et genere la bonne impusion pour attaquer un ESC.
Bon couarge pour la suite.
J'ai parcouru en diagonal, et je peux dire que le montage a base de NE555 et a jetter a la poubelle, car la tension n'etant pas stable a cause du moteur le signal issue du Ne555 ne le sera pas non plus, c'est pour ca que je me suis basé sur un circuit logic qui mesure la largeur d'impulsion et genere la bonne impusion pour attaquer un ESC.
Bon couarge pour la suite.
 France PhoenixRC PCM9XII Trex250 Beast + Trex450Pro Beast + Trex500ESP BeastX + Trex600ESP BeastX + BeamAvantgarde600 Beast + Trex700E V2 en cours de montage
France PhoenixRC PCM9XII Trex250 Beast + Trex450Pro Beast + Trex500ESP BeastX + Trex600ESP BeastX + BeamAvantgarde600 Beast + Trex700E V2 en cours de montageRV4+DLE30, Katana, MiniSwift, Yak54 EPP, Foxy, Cherokee, EasyStar ...
Videos: Page Perso
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
c'est donc bien ce que je penssais on est dependant de la tension de la lipo et de la conso du moteur...
dommage...
bon bhas vas faloir faire petter l'oscilloscope !
dommage...
bon bhas vas faloir faire petter l'oscilloscope !
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
bhen voila que je suis tombé sur ce qu'il nous faut vendus dejas tout fait ! ....
http://www.hobbycity.com/hobbycity/stor ... 4_&__LAMA3#" onclick="window.open(this.href);return false;
bon ok c'est pour les lamas et pour un FP on as juste besoin des modules de conversion et d'utiliser d'autres esc et moteurs....
y as peut etre moyen de les avoir seul
http://www.hobbycity.com/hobbycity/stor ... 4_&__LAMA3#" onclick="window.open(this.href);return false;
bon ok c'est pour les lamas et pour un FP on as juste besoin des modules de conversion et d'utiliser d'autres esc et moteurs....
y as peut etre moyen de les avoir seul
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
Jonathan06
- DARK VADOR
- Messages : 6034
- Enregistré le : 26 août 2007, 23:23
- Localisation : Nice
- Contact :
Ben oui, ce module fais la meme chose que le mien, sauf que pour le mien vous avez tout ce qu'il faut pour les faire vous meme et les adapter si necessaire, puisque vous etes electroniciens.
Je rappel juste qu'il ya un article sur heli4 qui donne les shemas et le prog.
Je rappel juste qu'il ya un article sur heli4 qui donne les shemas et le prog.
France PhoenixRC PCM9XII Trex250 Beast + Trex450Pro Beast + Trex500ESP BeastX + Trex600ESP BeastX + BeamAvantgarde600 Beast + Trex700E V2 en cours de montageRV4+DLE30, Katana, MiniSwift, Yak54 EPP, Foxy, Cherokee, EasyStar ...
Videos: Page Perso
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
Et.... BINGO !.....
trouvé tout fait pour ceux qui ne veullent pas se casser le tete
http://www.helidirect.com/hdx-brushless ... p-4111.hdx" onclick="window.open(this.href);return false;
par contre le pdf d'installation... pas tres claire <_<
bon ca resouds pas mon pb de transformation de 4en1 de bi en 4en1 de FP tout ca... mais c bon a savoir
trouvé tout fait pour ceux qui ne veullent pas se casser le tete
http://www.helidirect.com/hdx-brushless ... p-4111.hdx" onclick="window.open(this.href);return false;
par contre le pdf d'installation... pas tres claire <_<
bon ca resouds pas mon pb de transformation de 4en1 de bi en 4en1 de FP tout ca... mais c bon a savoir
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
akoirium
- DARK VADOR
- Messages : 5776
- Enregistré le : 02 févr. 2009, 01:33
bhen je l'aurais fait depuis longtemps si j'avais tout le matos et les competences justement...Jonathan06 @ 3 Apr 2009, à 16:48 a écrit : Ben oui, ce module fais la meme chose que le mien, sauf que pour le mien vous avez tout ce qu'il faut pour les faire vous meme et les adapter si necessaire, puisque vous etes electroniciens.
Je rappel juste qu'il ya un article sur heli4 qui donne les shemas et le prog.
je suis electricien... pas electronicien...nuance...
"Une vis foireuse n'existe pas..., mais les bon outils oui !... donc j'ai des outils foireux..." (Moi)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
"Software is like sex ... it's better when it's free !!!..." (Linus Torvalds le créateur de linux)
-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
Hello tout le monde, voila il est un peu tard mais c'est a cette heure la que je rentre
Bon hé bien voila, aujourd'hui mon DM4 a fait son premier vol en exterieur, si si. et avec un peu de vent, j'ai comment dire un peu claqué des dents, (mais pas des manches heureusement)
tout s'est bien passé, j'ai pris ma dose d'adrenaline pour les 3 prochains jours
C'est mon 5 eme vol en comptant les stationnaires du coup j'suis assez content, j'ai fait quelques translations et quelques virages, mais j'ai une certaine tendance a vouloir ramener l'helico dans sa position initiale quand ca part un peu en saucisse. enfin.. j'etait bien content,
j'en ai profité pour ressortir l'avion aussi, l'extra 300 etait assez content de reprendre du service et de s'aquiter de la poussière sur ses ailes. ca m'as permis de me défouler aussi, sans trop de stress.
En effet le montage avec le ne555 posera un soucis, cependant je trouve que le module tout fait a 33$ c'est un peu cher.
bon effectivement il faut avoir de quoi programmer un pic pour faire le montage de jonathan06, mais on doit pouvoir se débrouiller, je n'ai pas ce qu'il faut en ce qui me concerne, je n'ai qu'une interface avec des support pour un ou deux Atmel.
mais il est vrai que cela serais beaucoup moins couteux de faire ca nous même.
Il y a bien un petit moment que j'me suis pas penché sur la prog de ces petite bestioles. et j'avais jamais trop approfondi la chose non plus..
Bon demain je m'incruste chez un collègue et je vais lui emprunter son oscillo pour essayer de voir quels signaux on a dans cette petite boiboite. en ce qui me concerne je ne lâche pas mon odée de rotor AC a pas variable sur le DM4.
ca dépendra des secrets que nous livrera cette petite boite demain.
en ce qui concerne la mécanique du rotor AC pas variable pour le DM4, je me suis arreté sur celle du copterX, la mécanique est légère robuste, de dimension adaptée et assez simple à adapter et bidouiller. j'en ai donc fait acquisition.
Voila y'a plus qu'a voir le coté électronique de la chose. et mécanique évidement puisque j'attend toujours mon petit moteur emax cf2805 pour remplacer le hacker que j'ai mis dessus temporairement qui est beaucoup trop puissant.
assez pour enmener l'helico et la nappe du salon à laquelle il était scotché
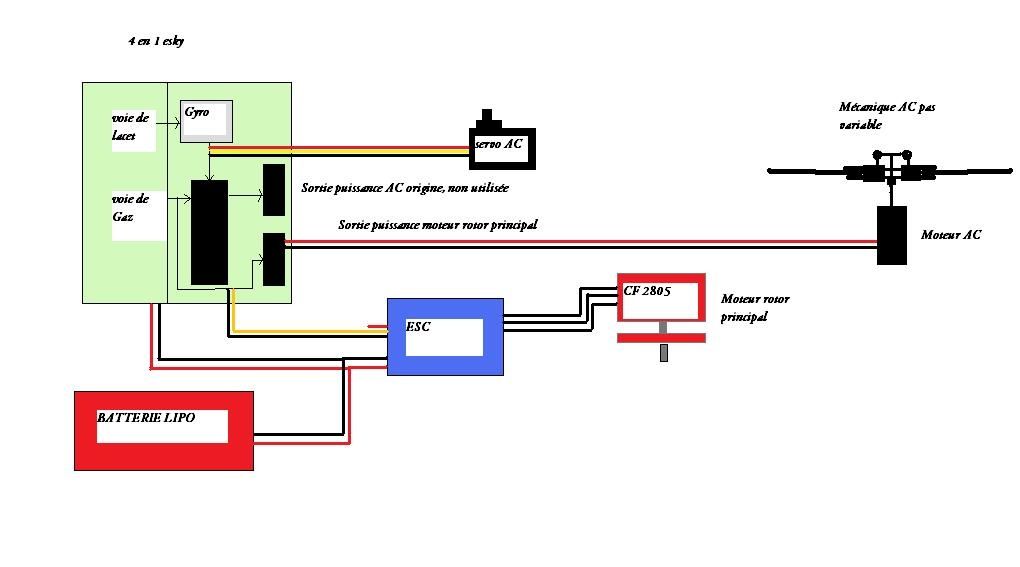
Voici un bref petit schema de ce que je compte faire pour mon AC, ou du moins que j'espère aboutir :
voila voila. bon demain c'est le verdict sur ce projet.. enfin ca devrais
bon après promis je transforme mon FP en CP..
Ou le plomb en Or, je sais pas encore quelle piste est la plus interessante
bonne soirée tout le monde, enfin bonne nuit.
n'hesitez pas a me donner votre avis !!
Bon hé bien voila, aujourd'hui mon DM4 a fait son premier vol en exterieur, si si. et avec un peu de vent, j'ai comment dire un peu claqué des dents, (mais pas des manches heureusement)
tout s'est bien passé, j'ai pris ma dose d'adrenaline pour les 3 prochains jours
C'est mon 5 eme vol en comptant les stationnaires du coup j'suis assez content, j'ai fait quelques translations et quelques virages, mais j'ai une certaine tendance a vouloir ramener l'helico dans sa position initiale quand ca part un peu en saucisse. enfin.. j'etait bien content,
j'en ai profité pour ressortir l'avion aussi, l'extra 300 etait assez content de reprendre du service et de s'aquiter de la poussière sur ses ailes. ca m'as permis de me défouler aussi, sans trop de stress.
En effet le montage avec le ne555 posera un soucis, cependant je trouve que le module tout fait a 33$ c'est un peu cher.
bon effectivement il faut avoir de quoi programmer un pic pour faire le montage de jonathan06, mais on doit pouvoir se débrouiller, je n'ai pas ce qu'il faut en ce qui me concerne, je n'ai qu'une interface avec des support pour un ou deux Atmel.
mais il est vrai que cela serais beaucoup moins couteux de faire ca nous même.
Il y a bien un petit moment que j'me suis pas penché sur la prog de ces petite bestioles. et j'avais jamais trop approfondi la chose non plus..
Bon demain je m'incruste chez un collègue et je vais lui emprunter son oscillo pour essayer de voir quels signaux on a dans cette petite boiboite. en ce qui me concerne je ne lâche pas mon odée de rotor AC a pas variable sur le DM4.
ca dépendra des secrets que nous livrera cette petite boite demain.
en ce qui concerne la mécanique du rotor AC pas variable pour le DM4, je me suis arreté sur celle du copterX, la mécanique est légère robuste, de dimension adaptée et assez simple à adapter et bidouiller. j'en ai donc fait acquisition.
Voila y'a plus qu'a
assez pour enmener l'helico et la nappe du salon à laquelle il était scotché
Voici un bref petit schema de ce que je compte faire pour mon AC, ou du moins que j'espère aboutir :
voila voila. bon demain c'est le verdict sur ce projet.. enfin ca devrais
bon après promis je transforme mon FP en CP..
Ou le plomb en Or, je sais pas encore quelle piste est la plus interessante
bonne soirée tout le monde, enfin bonne nuit.
n'hesitez pas a me donner votre avis !!
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
RolluS
- Tuteur - Webmaster
- Messages : 13244
- Enregistré le : 31 déc. 2007, 00:55
- Contact :
Joli tout ca, ca devrait marcher...
Il me semble bien que quelqu'un a déjà sorti des signaux "servos" du 4en1 esky...
Il me semble bien que quelqu'un a déjà sorti des signaux "servos" du 4en1 esky...
Besoin d'un tuteur? (¯`·._. ★ RolluS Academy ★ ._.·´¯)
Ma page perso: (¯`·._. RolluS Zone ._.·´¯)
Kaos Technology Logo 630 FBL (destruction terminée Phoenix 3.0 Hitec Aurora 9-
pilip
- Caporal
- Messages : 42
- Enregistré le : 14 mars 2009, 01:23
VHello tout le monde.
voila ca matin je me lève. le pc s'allume et paint me tombe sous la main.
Donc un petit shema de mon probable futur Rotor d'AC à pas variable.
histoire de matérialiser tout ca

voila en avant les mesures maintenant.
bonne journée et bons vols a tous
voila ca matin je me lève. le pc s'allume et paint me tombe sous la main.
Donc un petit shema de mon probable futur Rotor d'AC à pas variable.
histoire de matérialiser tout ca
voila en avant les mesures maintenant.
bonne journée et bons vols a tous
Mode : Newbie => objectif Stationnaire (tintin me rirais au nez)
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
DM4 Brushless (Hacker's motor)- 2S 1350Mah - superskids - 4 en1 esky.
signe particulier= rotor de queue en plastique de bouteille coca
FF6 - Futaba
-
RolluS
- Tuteur - Webmaster
- Messages : 13244
- Enregistré le : 31 déc. 2007, 00:55
- Contact :
Pourquoi ne pas utiliser un AC déjà existant?
http://www.ehirobo.com/shop/shopping_cart.php" onclick="window.open(this.href);return false;
Il suffit de ne modifier la partie qui se monte sur le tube.. si tu veux j'en ai un pour pièce, il manque juste ca et ca
Pour la fixation, tu peux rallonger les 2 plaques qui supportent les roulements de l'axe, afin de mettre ta grande roue dentée au lieu de la poulie pour la courroie..
Tu as ainsi un système tout fait et en alu pour une poignée de dollards..
En charchant bien, j'en ai un en plastique (léger) de wasp aussi
http://www.ehirobo.com/shop/shopping_cart.php" onclick="window.open(this.href);return false;
Il suffit de ne modifier la partie qui se monte sur le tube.. si tu veux j'en ai un pour pièce, il manque juste ca et ca
Pour la fixation, tu peux rallonger les 2 plaques qui supportent les roulements de l'axe, afin de mettre ta grande roue dentée au lieu de la poulie pour la courroie..
Tu as ainsi un système tout fait et en alu pour une poignée de dollards..
En charchant bien, j'en ai un en plastique (léger) de wasp aussi
Besoin d'un tuteur? (¯`·._. ★ RolluS Academy ★ ._.·´¯)
Ma page perso: (¯`·._. RolluS Zone ._.·´¯)
Kaos Technology Logo 630 FBL (destruction terminée Phoenix 3.0 Hitec Aurora 9-
RolluS
- Tuteur - Webmaster
- Messages : 13244
- Enregistré le : 31 déc. 2007, 00:55
- Contact :
Voici les photos de l'AC skyartec: old.forum.heli4.com/index.php?showtopic...ndpost&p=140932
Besoin d'un tuteur? (¯`·._. ★ RolluS Academy ★ ._.·´¯)
Ma page perso: (¯`·._. RolluS Zone ._.·´¯)
Kaos Technology Logo 630 FBL (destruction terminée Phoenix 3.0 Hitec Aurora 9Qui est en ligne
Utilisateurs parcourant ce forum : Aucun utilisateur enregistré et 1 invité